はじめまして!こんにちは電装班パートリーダーの伊東です。
春休みも後半戦となり、ようやく完成形が見えてきたので、今年の機体に搭載する計器類について紹介しようと思います。
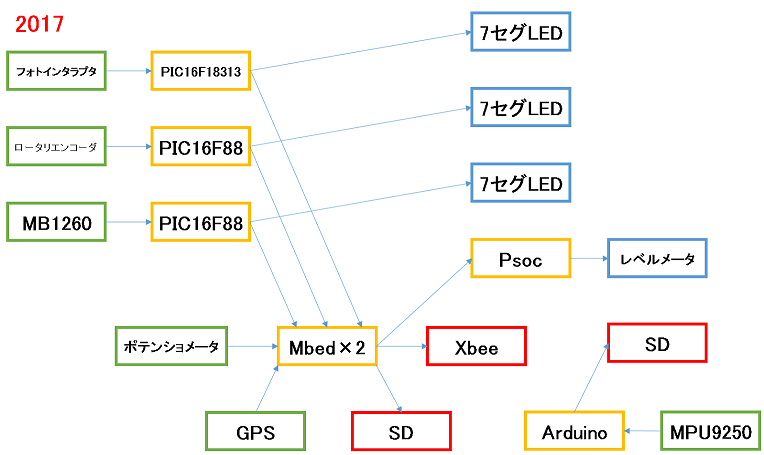
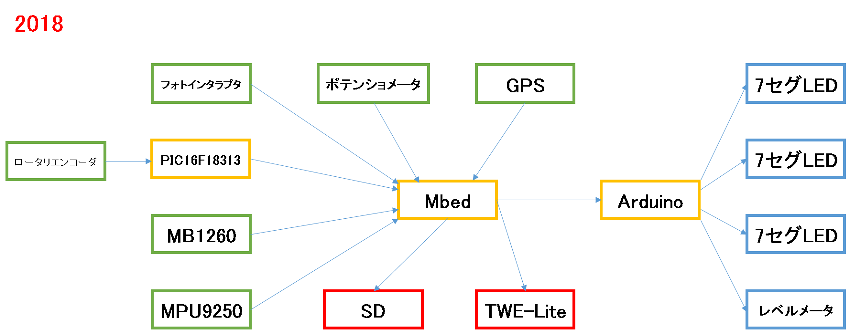
計器類は去年と同じく回転数、機速、高度、姿勢角、舵角、位置情報の表示や記録とZigBeeモジュールを用いたテレメトリを行います。
去年と大幅に異なるのは配線や処理を見直してマイコンの数を減らした点です。
その結果、メイン基板の小型化や作業工数、消費電力の削減を実現できました。
昨年と今年の電装システムを比較するとこのような感じになります。
メイン基板(下写真)も昨年に比べて小さくなりました。今はユニバーサル基板ですが両面プリント基板に置き換える予定です。

また(今年度、実機には搭載しませんが)Androidアプリと出力計の実験も行いました。
Androidアプリは飛行中の航路表示を目的として作成してみました。
GoogleMapで現在地、通過経路、姿勢角等の記録や表示、チェックポイントの選択などが行えるようになっています。
将来的には外部からデータ入力して記録できるようにしたり、オフラインマップに対応できるようにしたりしたいです。
下のスクリーンショットは工学部の裏の山道通った時のログです。

出力計は他の大学の鳥人間サークルの方から聞いた情報やいろいろなサイトを参考に作ってみました。
下の写真のようにクランクにひずみゲージとArduinoNano、Xbeeを取り付けてクランクのひずみ値を送信するようにし、受信側は回転数計とmbedを用いて出力を算出しました。
まだ信頼できる値が取れていない状況なので今後改良していこうと思います。

TFまであと3か月弱、これからも誠心誠意、製作に励んでいこうと思います!
春休みも後半戦となり、ようやく完成形が見えてきたので、今年の機体に搭載する計器類について紹介しようと思います。
計器類は去年と同じく回転数、機速、高度、姿勢角、舵角、位置情報の表示や記録とZigBeeモジュールを用いたテレメトリを行います。
去年と大幅に異なるのは配線や処理を見直してマイコンの数を減らした点です。
その結果、メイン基板の小型化や作業工数、消費電力の削減を実現できました。
昨年と今年の電装システムを比較するとこのような感じになります。


メイン基板(下写真)も昨年に比べて小さくなりました。今はユニバーサル基板ですが両面プリント基板に置き換える予定です。

また(今年度、実機には搭載しませんが)Androidアプリと出力計の実験も行いました。
Androidアプリは飛行中の航路表示を目的として作成してみました。
GoogleMapで現在地、通過経路、姿勢角等の記録や表示、チェックポイントの選択などが行えるようになっています。
将来的には外部からデータ入力して記録できるようにしたり、オフラインマップに対応できるようにしたりしたいです。
下のスクリーンショットは工学部の裏の山道通った時のログです。

出力計は他の大学の鳥人間サークルの方から聞いた情報やいろいろなサイトを参考に作ってみました。
下の写真のようにクランクにひずみゲージとArduinoNano、Xbeeを取り付けてクランクのひずみ値を送信するようにし、受信側は回転数計とmbedを用いて出力を算出しました。
まだ信頼できる値が取れていない状況なので今後改良していこうと思います。

TFまであと3か月弱、これからも誠心誠意、製作に励んでいこうと思います!
2018,03,27 Tue 10:01
コメント
コメントする
この記事のトラックバックURL
http://www.windnauts.sakura.ne.jp/tb.php/457
トラックバック